品質レポートマニュアル
品質レポート
空中三角測量結果のデータが表示されます。
プロジェクトの概要
| プロジェクト |
プロジェクトの名前。 |
| 写真枚数 |
入力した写真の合計枚数。 |
| 地面の適用範囲 |
プロジェクトの適用範囲となる地面。 |
| 地面の平均解像度 |
"実世界"の単位で表される1ピクセルの平均サイズ。この値が大きくなると、画像の空間解像度が低くなり、リコンストラクションに表示される詳細も少なくなります。 |
| 尺度 |
写真で測定された距離と地面上の対応する距離の割合。画像の解像度を考慮すると、3Dプリントでの使用に最適の尺度です。 |
| カメラのモデル |
画像をラスターで保存するために使用されるカメラのモデルの名前。 |
| 処理日付 |
処理の日付。 |
| 処理時間 |
空中三角測量の処理にかかった時間。 |
品質概要
| データセット |
キャリブレーション後に正常に配置された写真の数。モデルのリコンストラクションに使用されます。
|
| キーポイント |
ContextCaptureで写真上で自動検出された特徴点の数。 |
| タイポイント |
ContextCaptureで写真データセット上で検出されたタイポイントの数。タイポイントは、対応する2次元キーポイントによって2枚以上の画像で識別された3次元の点です。 |
| 投影誤差(RMS) |
投影誤差(ピクセル数)。RMS 値は、生成された各タイポイントに対して計算された二乗投影誤差の平均の平方根を表します。 |
| 位置決定とスケール付与 |
画像が座標付けされているか、およびプロジェクトで基準点またはスケールの指定が使用されているかを示します。 |
カメラのキャリブレーション
カメラのキャリブレーション中に、ContextCaptureは写真の取得に使用されたすべてのカメラのレンズと画像センサーのパラメータを推定します。このセクションには、個々のカメラごとに、推定されたキャリブレーションの結果とディストーショングリッドの詳細が表示されます。
キャリブレーションの結果
個々のカメラについて、初期のキャリブレーション値と最適化の結果が、それらの差異とともに表示されます。
| パースペクティブレンズのカメラパラメータ |
|
焦点距離[mm] |
35 mm換算焦点距離[mm] |
プリンシパルポイントX[ピクセル] |
プリンシパルポイントY[ピクセル] |
K1 |
K2 |
K3 |
P1 |
P2 |
| 前の値 |
24.00 |
24.00 |
|
|
|
|
|
|
|
| 最適化された値 |
24.53 |
24.53 |
2878.57 |
1570.15 |
-0.0964 |
0.0918 |
-0.0244 |
0 |
0 |
| 前の値と最適化された値の差 |
0.53 |
0.53 |
|
|
|
|
|
|
|
|
| 前の値 |
カメラのキャリブレーションの初期値として使用される値。これらの値は、カメラのモデルまたは前のキャリブレーションから取得できます。
|
| 最適化された値 |
カメラのキャリブレーションから計算され、処理に使用される最適化された値。 |
| 前の値と最適化された値の差 |
前の値が存在する場合の、最適化された値と前の値(入力値)との差異。
|
| 焦点距離 |
カメラの焦点距離。 |
| 35 mm換算焦点距離 |
実際のレンズとセンサーの組み合わせと同じビュー角度を35 mmカメラで取得するために必要な焦点距離。 |
| プリンシパルポイントX |
プリンシパルポイントのX画像座標(ピクセル単位)。プリンシパルポイントは画像の中心に配置されます。点(0, 0)は画像の左上隅に置かれます。 |
| プリンシパルポイントY |
プリンシパルポイントのY画像座標(ピクセル単位)。プリンシパルポイントは画像の中心に配置されます。点(0, 0)は画像の左上隅に置かれます。 |
| K1 |
1つ目のラジアルディストーション係数。 |
| K2 |
2つ目のラジアルディストーション係数。 |
| K3 |
3つ目のラジアルディストーション係数。 |
| P1 |
1つ目のタンデンシャルディストーション係数。 |
| P2 |
2つ目のタンデンシャルディストーション係数。 |
| 魚眼レンズのカメラパラメータ |
|
焦点距離[mm] |
35 mm換算焦点距離[mm]
|
プリンシパルポイントX[ピクセル]
|
プリンシパルポイントY[ピクセル] |
P0 |
P1 |
P2 |
P3 |
P4 |
| 前の値 |
15.00 |
15.00 |
|
|
|
|
|
|
|
| 最適化された値 |
15.00 |
15.00 |
2703.26 |
1811.04 |
0 |
1 |
-0.0112 |
-0.0683 |
0 |
| 前の値と最適化された値の差 |
0.00 |
0.00 |
|
|
|
|
|
|
|
|
| 前の値 |
カメラのキャリブレーションの初期値として使用される値。これらの値は、カメラのモデルまたは前のキャリブレーションから取得できます。
|
| 最適化された値 |
カメラのキャリブレーションから計算され、処理に使用される最適化された値。 |
| 前の値と最適化された値の差 |
前の値が存在する場合の、最適化された値と前の値(入力値)との差異。
|
| 焦点距離 |
カメラの焦点距離。 |
| 35 mm換算焦点距離 |
実際のレンズとセンサーの組み合わせと同じビュー角度を35 mmカメラで取得するために必要な焦点距離。 |
| プリンシパルポイントX |
プリンシパルポイントのX画像座標(ピクセル単位)。プリンシパルポイントは画像の中心に配置されます。点(0, 0)は画像の左上隅に置かれます。 |
| プリンシパルポイントY |
プリンシパルポイントのY画像座標(ピクセル単位)。プリンシパルポイントは画像の中心に配置されます。点(0, 0)は画像の左上隅に置かれます。 |
| P0 |
1つ目のディストーション係数。 |
| P1 |
2つ目のディストーション係数。 |
| P2 |
3つ目のディストーション係数。 |
| P3 |
4つ目のディストーション係数。 |
ディストーショングリッド
ラジアルディストーションとタンデンシャルディストーションを組み合わせて、推定レンズディストーションをビジュアル化しています。
|
カメラのレンズディストーション: グレーの線はゼロのディストーショングリッドを、青の線は本物のカメラの値を表します。
|
|
| この画像はレンズディストーションを示しています。これは、レンズが直線であるべき場所に曲線を生成する度合いです。レンズディストーションは、ほとんどの種類のカメラで見られる共通の作用であり、処理中にContextCaptureによって考慮されます。 |
写真位置
このセクションでは、一連の計測を使用して計算された写真位置を定義し、ユーザーが配置における潜在的な誤差を識別できるようにします。
セクション「写真位置の不確かさ」は、ContextCaptureの最適化が推定写真位置についてどの程度の確実性があるかを示します。写真位置を囲む楕円が大きいほど、不確かさが大きくなります。
|
位置の不確かさ: 上面(XY平面)、側面(ZY平面)および正面(XZ平面)での計算された写真位置(黒い点)を示します。青の楕円は位置の不確かさを示します。読みやすくするために拡大されています。最小値と最大値、および平均値は「写真位置の不確かさ」の表にあります。
|
|
| カメラ位置の不確かさの方向と大きさ。不確かさは、3つの平面ビューに投影された3次元楕円として表されます。 |
| 位置の不確かさ |
|
X [メートル] |
Y [メートル] |
Z [メートル] |
| 最小 |
0.0013 |
0.0012 |
0.0014 |
| 平均 |
0.002 |
0.0018 |
0.0022 |
| 最大 |
0.003 |
0.0031 |
0.0034 |
|
| 最小X/Y/Z |
計算されたカメラ位置のX、Y、Z方向の最小の不確かさ。 |
| 平均X/Y/Z |
計算されたカメラ位置のX、Y、Z方向の平均の不確かさ。 |
| 最大X/Y/Z |
計算されたカメラ位置のX、Y、Z方向の最大の不確かさ。 |
「入力位置との距離」には、ユーザーが指定した入力位置から最適化された値までの距離が矢印と色で示されます。このセクションは、入力位置が指定されている場合にのみ表示されます。
|

メタデータ位置との距離: 上面(XY平面)、側面(ZY平面)および正面(XZ平面)について、矢印でメタデータの位置と計算された写真位置のオフセットを示します。すべての矢印はメタデータ位置から始まり、計算された位置に向かいます。グレーの点
はメタデータを含む未測定写真を示します。ピンクの点
はメタデータを含まない測定済み写真を示します。
|
|
| 3次元矢印は、各入力カメラ位置(開始点)を対応する最適化された位置(矢印で表される終点)にリンクします。2次元ビューは、XY、ZY、およびXZ平面へのこれらの3次元矢印の投影です。矢印は3次元の長さに従って色付けされ、非常に長い矢印は赤になります。 |
セクション「シーンの適用範囲」には、各範囲が表示されている可能性がある写真枚数が色で示されます。
|
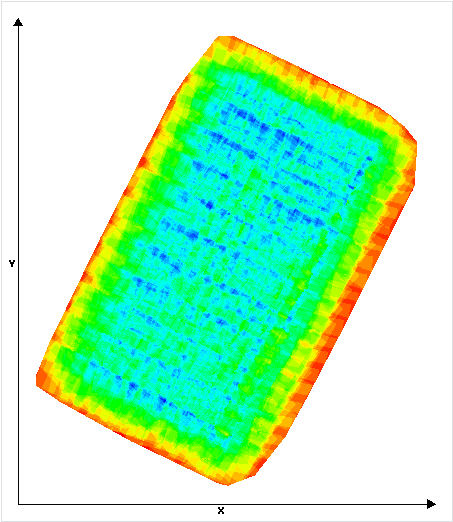

シーンが表示されている写真枚数: 各範囲が表示されている可能性がある写真枚数を色で表した、シーンの上図面(XY平面)表示。
|
|
| この画像は、表示されている可能性のある写真枚数に応じて各シーンの領域を色付けすることにより、シーンに関するプロジェクトの情報量を示しています。 |
写真の照合
「写真の照合」では、自動的に生成されたタイポイント(すべての写真と一致する)を確認し、さまざまな品質測定値を使用して一致が正しいことを検証したり、潜在的な問題を試して特定します。
タイポイントの品質尺度
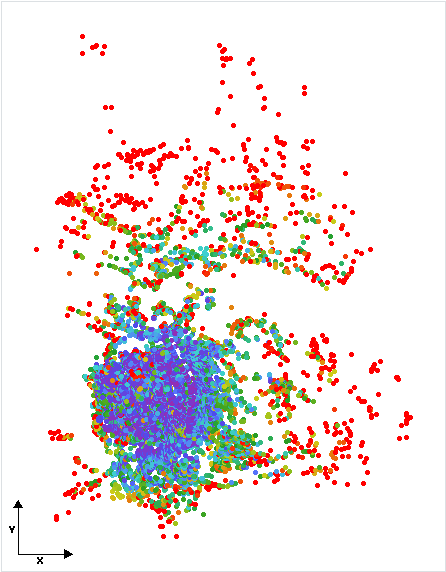
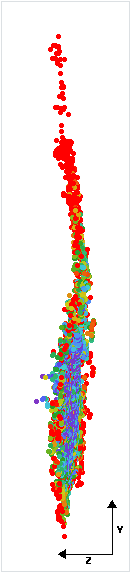
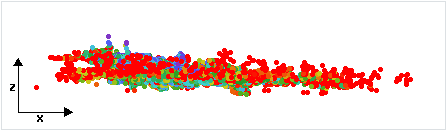
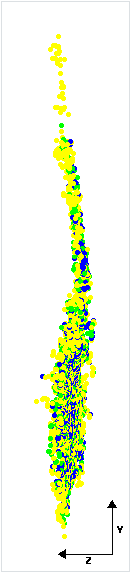
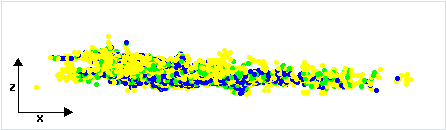
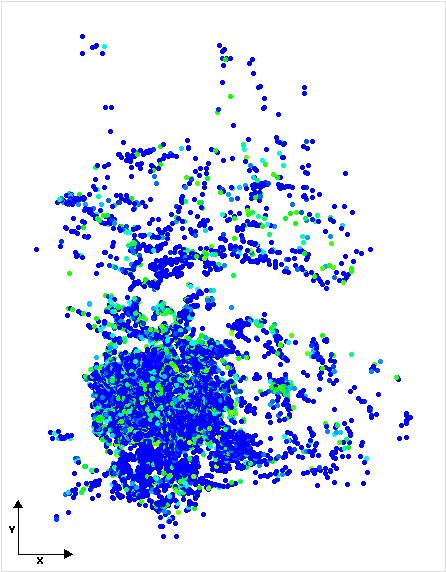
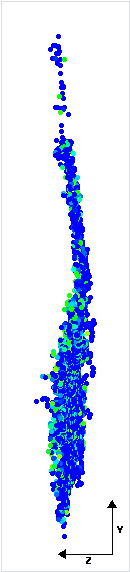
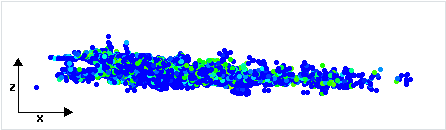
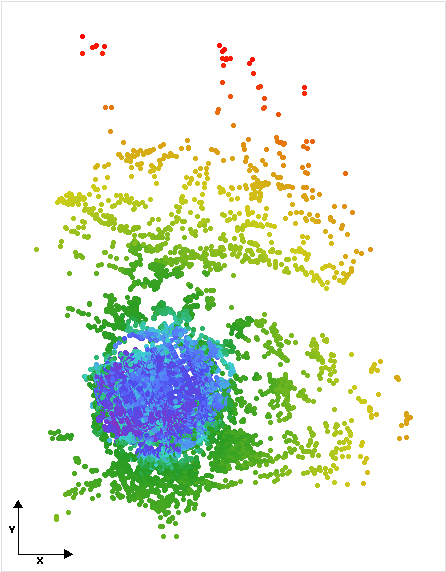
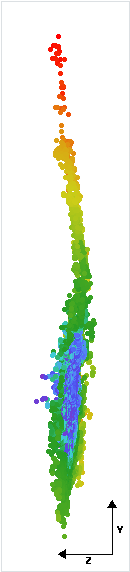
セクション「タイポイント位置の不確かさ」には、個々のタイポイント位置の不確かさが視覚的に表されます。
|

位置の不確かさ: 個々の点の位置の不確かさを色で表した、すべてのタイポイントの上面(XY平面)、側面(ZY平面)および正面(XZ平面)図です。値はメートル単位で、最小の不確かさは0.0041メートル、最大は2.079メートルです。平均の位置の不確かさは0.0916メートルです。
|
|
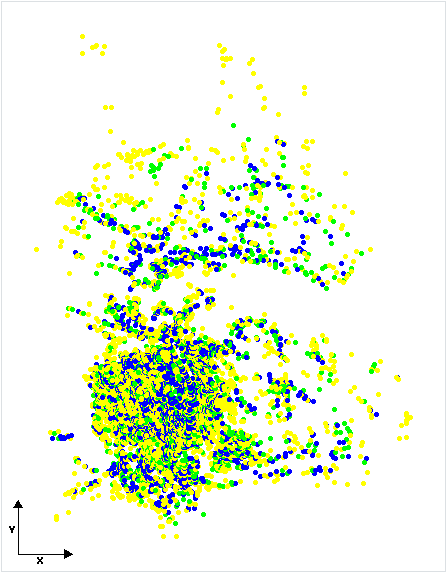
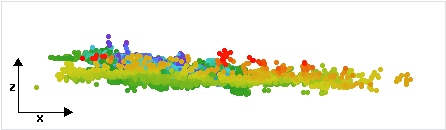
「タイポイントを観測している写真の枚数」には、各点を定義するために使用された写真の枚数が表示されます。
|

タイポイントごとの観測数: すべてのタイポイントの上面(XY平面)、側面(ZY平面)および正面(XZ平面)図で、各点の定義に使用された写真枚数を色で表示します。タイポイントあたりの写真の最小枚数は3、最大枚数は48です。タイポイントを観測する写真の平均枚数は5です。
|
|
「投影誤差」では、各タイポイントのピクセル単位の投影誤差を考慮して、シーンの上面、側面および正面におけるこれらの値をグラフィカルに表示します。
|

タイポイントごとの投影誤差: すべてのタイポイントの上面(XY平面)、側面(ZY平面)および正面(XZ平面)図で、ピクセル単位の投影誤差を色で表示します。最小投影誤差は0.01ピクセル、最大投影誤差は1.71ピクセルです。平均投影誤差は0.43ピクセルです。
|
|
「タイポイントの解像度」では、すべてのタイポイントの複数ビュー投影で、個々の点の位置の解像度を色で表示します。
|

解像度: すべてのタイポイントの上面(XY平面)、側面(ZY平面)および正面(XZ平面)図で、個々の点の位置の解像度を色で表示します。値はメートル/ピクセル単位で表され、最小解像度は0.012メートル/ピクセル、最大解像度は0.0967メートル/ピクセルです。平均解像度は0.0202メートル/ピクセルです。
|
|
点群までの距離
このセクションは、写真とスキャンを組み合わせたプロジェクトの場合にのみ表示されます。写真をスキャンに揃えるためにアルゴリズムによって調整が実行されると、測定された距離を詳しく記した表がレポートに表示されます。
| 写真とスキャンから抽出したタイポイント間の距離 |
|
初期値 |
最適化された値 |
| オーバーラップ(0.5 units未満での点の数) |
0.01 units未満での点の数 |
オーバーラップ(0.5 units未満での点の数) |
0.01 units未満での点の数 |
| スキャン1 |
89554
(タイポイント合計数の45.29%) |
11113
(タイポイント合計数の5.62%)
(オーバーラップの12.41%) |
89744
(タイポイント合計数の45.38%) |
20665
(タイポイント合計数の10.45%)
(オーバーラップの23.03%) |
| スキャン2 |
66784
(タイポイント合計数の33.77%) |
5227
(タイポイント合計数の2.64%)
(オーバーラップの7.83%) |
66910
(タイポイント合計数の33.84%) |
11402
(タイポイント合計数の5.77%)
(オーバーラップの17.04%) |
| グローバル距離 |
136298
(タイポイント合計数の68.93%) |
14108
(タイポイント合計数の7.13%)
(オーバーラップの10.35%) |
136588
(タイポイント合計数の69.07%) |
27693
(タイポイント合計数の14%)
(オーバーラップの20.27%) |
|
| 初期値 |
写真と点群から抽出したタイポイント間の初期距離。 |
| 最適化された値 |
写真と点群から抽出したタイポイント間の最適化された距離。 |
| オーバーラップ |
スキャンにオーバーラップしているとみなされるタイポイントの数。これらは、ContextCaptureが可能な限りスキャンに合わせようとするポイントです。 |
追加のグラフには、点群でとらえたシーン全体、および個々のスキャンに関して、測定された距離の詳細が示されます。
|
点群までのタイポイントの距離に関する詳細:タイポイントの最初の位置と、点群を考慮して取得した最適化された値との比較。
|
|
測量
このセクションには、ユーザー定義の測量点に関する詳細情報が表示されます。
「基準点」セクションは、基準点が使用されている場合に表示されます。各基準点の詳細なデータを含む表とその推定位置の誤差がこのセクションに含まれます。また、投影誤差が過度に大きい場合には、オレンジまたは赤のフラグを表示して注意を促します。
フラグは、次のルールに従って、投影誤差値(またはこの値のRMS)に応じて色付けされます。
| フラグの色付け |
投影誤差のRMS[ピクセル] |
精度レベル |
|
|
1ピクセル未満 |
高 |
|
|
1~3ピクセル |
中 |
|
|
3ピクセル超 |
低 |
| 基準点誤差 |
| 名前 |
カテゴリ |
精度[メートル] |
写真枚数 |
投影誤差のRMS[ピクセル] |
光軸までの距離のRMS[メートル] |
3D誤差[メートル] |
水平誤差[メートル]
|
垂直誤差[メートル] |
|
| gps9 |
3D |
水平: 0
垂直: 0 |
4 |
0 |
0.0001 |
0 |
0 |
0 |
|
| gps5 |
3D |
水平: 0
垂直: 0 |
3 |
0 |
0.0003 |
0.0005 |
0.0003 |
0.0004 |
|
| GPS0003 |
3D |
水平: 0
垂直: 0 |
3 |
0.01 |
0.0002 |
0.0003 |
0.0002 |
-0.0002 |
|
| グローバルRMS |
0
|
0.0002
|
0.0003
|
0.0002
|
0.0002
|
|
| 中央値 |
0
|
0.0002
|
0
|
0
|
0
|
|
|
| 名前 |
基準点の名前。 |
| カテゴリ |
基準点が完全な3D位置、または水平(X,Y)座標のみ、もしくは垂直(Z)座標のみ、のいずれであるかを示します。 |
| 精度 |
ユーザー指定の点の精度。水平精度は、入力XおよびY座標の推定精度を示します。垂直精度は、入力Z座標の推定精度を示します。精度の高い基準点は空中三角測量での重みが増します。 |
| 写真枚数 |
基準点を観測した写真の枚数。 |
| 投影誤差のRMS |
投影誤差(ピクセル数)。RMSは、点の投影誤差が表示されるすべての写真におけるその投影誤差の二乗平均平方根です。 |
| 光軸までの距離のRMS |
光軸までの距離を二乗した数値の平均の平方根。光軸は、特定の写真の位置から始まり、その写真の中で観測される基準点の位置を通過する、3Dラインです。実際の点の3D位置からその光軸までの直交距離が、光軸までの距離です。 |
| 3D誤差 |
入力した3D位置と推定された3D位置との間の距離(メートルまたは単位)。 |
| 水平誤差 |
入力した3D位置と推定された3D位置との間の水平距離(メートルまたは単位)。 |
| 垂直誤差 |
入力した3D位置と推定された3D位置との間の垂直距離(メートルまたは単位)。 |
| グローバルRMS |
対応する列値の二乗平均平方根。 |
| 中央値 |
対応する列値の中央値。 |
「ユーザータイポイント」セクションは、手動で定義されたタイポイントが使用されている場合に表示されます。基準点について、各点に関する詳細情報を示す表が含まれます。投影誤差が大きい場合はオレンジまたは赤のフラグで注意を促します。
| フラグの色付け |
投影誤差のRMS[ピクセル] |
精度レベル |
|
|
1ピクセル未満 |
高 |
|
|
1~3ピクセル |
中 |
|
|
3ピクセル超 |
低 |
| ユーザータイポイント誤差 |
| 名前 |
写真枚数 |
投影誤差のRMS[ピクセル] |
光軸までの距離のRMS[メートル] |
|
| ユーザータイポイント#1 |
3 |
0.53 |
0.0094 |
|
| ユーザータイポイント#2 |
3 |
0.43 |
0.0068 |
|
| グローバルRMS |
0.48
|
0.0082
|
|
| 中央値 |
0.53
|
0.0094
|
|
|
| 名前 |
ユーザータイポイントの名前。 |
| 写真枚数 |
ユーザータイポイントを観測した写真の枚数。 |
| 投影誤差のRMS |
投影誤差(ピクセル数)。RMSは、点の投影誤差が表示されるすべての写真におけるその投影誤差の二乗平均平方根です。 |
| 光軸までの距離のRMS |
光軸までの距離を二乗した数値の平均の平方根。光軸は、特定の写真の位置から始まり、その写真の中で観測されるユーザータイポイントの位置を通過する、3Dラインです。実際の点の3D位置からその光軸までの直交距離が、光軸までの距離です。 |
| グローバルRMS |
対応する列値の二乗平均平方根。 |
| 中央値 |
対応する列値の中央値。 |
「位置指定」セクションは、ユーザータイポイントで制限が定義されている場合に表示されます。各制限に関する詳細情報の一覧が含まれています。スケールの指定がある場合は、次のデータが追加されます。
|
4個の位置指定:
- 原点の指定:O='右上隅'。
- 軸の指定:A='右下隅'; B='右上隅'; 直線AB=z軸。
- スケールの指定(2):
|
|
写真レポート
このレポートには、各写真に関する詳細情報が表示されます。セクションは情報の種類(位置の不確かさや接続数など)によって整理されます。各セクション内の最初の表には、その特定の測定に応じて最もパフォーマンスの低い写真が表示されます。2番目の表には、すべての写真と対応する値が表示されます。
位置の不確かさ
このセクションには各写真の位置の不確かさが表示されます。つまり、ContextCaptureの最適化が推定写真位置についてどの程度の確実性があるかを示します。
最初の表には、位置の不確かさがより大きい写真が表示されます。これらの写真の位置の確かさのスコアがデータセット内で最も低い場合でも、それらの写真の位置が不適切であることにはなりません。すべての写真はContextCaptureによりごくわずかな不確かさで配置されている可能性があり、最も低い値でも実際には適切な状態である可能性があります。
2番目の長い表には、データセット内のすべての写真が、その対応する不確かさの値とともに示されています。
|
|
| 写真 |
写真の名前。 |
| カメラのモデル |
写真を撮影するために使用されたカメラのモデルの名前。 |
| X/Y/Z |
X、Y、Z方向の位置の不確かさ。 |
このセクションには、ユーザーが指定した入力写真の位置からContextCaptureで計算された最適化された位置までの距離が表示されます。入力位置が使用可能な場合にのみレポートに表示されます。
最初の表には、入力写真位置との距離が大きい写真(位置の最大差異を含むデータセットの5%)が表示されます。この表は潜在的な問題を簡単に特定するために提供されますが、リストされている値が実際に受け入れられないことを示すものではありません。計算された距離が要件に対応する精度であるかどうかは、場合に応じてユーザーが判断します。
2つ目の表にはデータセット内のすべての写真が、それに対応する入力位置と計算された位置、およびこれら2つの位置間の距離とともに表示されます。
| 写真 |
計算された位置 |
入力位置 |
|
| 写真 |
カメラのモデル |
X |
Y |
Z |
X |
Y |
Z |
距離 |
| 0Z5A9686.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
-23.2351 |
-42.3024 |
507.846 |
-23.3265 |
-42.2932 |
507.915 |
0.114434 |
| 0Z5A9687.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
-23.0311 |
-42.2521 |
507.563 |
-23.119 |
-42.2414 |
507.633 |
0.112321 |
| 0Z5A9688.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
-20.3249 |
-42.7505 |
507.832 |
-20.4048 |
-42.7428 |
507.903 |
0.107306 |
|
| 写真 |
写真の名前。 |
| カメラのモデル |
写真を撮影するために使用されたカメラのモデルの名前。 |
| 計算された位置X/Y/Z |
最適化された写真位置のX、Y、Z値。 |
| 入力位置X/Y/Z |
入力写真位置のX、Y、Z値。 |
| 距離 |
入力写真位置と最適化された位置との間の距離。 |
生成されたタイポイント
このセクションには、各画像で自動的に抽出されたキーポイントとタイポイントの数の詳細が表示されます。また、各写真には誤差の計測が関連付けられ、写真の一致程度を示す測定値が表示されます。
このセクションには次の2つの表があります。
-
最初の表には、タイポイントの投影誤差が大きい写真(最大誤差を含むデータセットの5%)が表示されます。
-
2つ目の表にはデータセット内のすべての写真と、それらに対応するタイポイントと投影誤差の数が表示されます。
問題のある写真を簡単に検出するために、投影誤差値(またはこの値のRMS)に従って色付けされたフラグがそれぞれにアタッチされています。次のルールが適用されます。
| フラグの色付け |
投影誤差のRMS[ピクセル] |
精度レベル |
|
|
1ピクセル未満 |
高 |
|
|
1~3ピクセル |
中 |
|
|
3ピクセル超 |
低 |
| 写真 |
処理済みの値 |
|
| 写真 |
カメラのモデル |
キーポイント数 |
タイポイント数 |
投影誤差のRMS[ピクセル] |
光軸までの距離のRMS[メートル] |
| 0Z5A9686.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
45416 |
1666 |
0.504194 |
0.00827829 |
|
| 0Z5A9687.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
45891 |
1730 |
0.472052 |
0.00805313 |
|
| 0Z5A9688.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
45689 |
1773 |
0.476695 |
0.00824229 |
|
|
| 写真 |
写真の名前。 |
| カメラのモデル |
写真を撮影するために使用されたカメラのモデルの名前。 |
| キーポイント数 |
画像内のキーポイントの数。キーポイントは、2つ以上の画像で観察されたポイントです。 |
| タイポイント数 |
画像内の点の数。タイポイントは、正確と判断され、キャリブレーション後に3次元の点として維持されるキーポイントです。 |
| 投影誤差のRMS |
投影誤差(ピクセル数)。RMSは、写真に表示されるすべてのタイポイントの再投影における誤差の二乗平均平方根です。 |
| 光軸までの距離のRMS |
光軸までの距離を二乗した数値の平均の平方根。光軸は、特定の写真の位置から始まり、その写真の中で観測されるタイポイントの位置を通過する、3Dラインです。実際の点の3D位置からその光軸までの直交距離が、光軸までの距離です。 |
接合
このセクションでは、各写真に含まれる接合数の詳細が示されます。接合が弱いと見なされる写真(最小接合を含むデータセットの5%)が最初の表にリストされます。2つ目の表にはすべての写真のリストが、その対応する接合数とともに表示されます。
| 写真 |
前の値 |
処理済みの値 |
| 写真 |
カメラのモデル |
テスト済みペア数 |
接合済み写真数 |
接合済み写真数 |
| 0Z5A9686.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
8 |
2 |
65 |
| 0Z5A9687.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
10 |
|
65 |
| 0Z5A9688.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
9 |
|
65 |
|
| 写真 |
写真の名前。 |
| カメラのモデル |
写真を撮影するために使用されたカメラのモデルの名前。 |
| テスト済みペア数 |
この写真でテスト済みの可能な接合数。 |
| 接合済み写真数 |
特定の写真に共通のタイポイントがある写真の数。 |
測量点
このセクションには、各写真の測量点が表示されます。
プロジェクトに基準点がある場合、基準点の精度がより低い(データセット内で最低の精度)写真を表示する表が含まれます。もう1つの表には各写真の基準点の数とその平均投影誤差の詳細が表示されます。
| 写真 |
前の値 |
処理済みの値 |
| 写真 |
カメラのモデル |
点の数 |
投影誤差のRMS[ピクセル] |
光軸までの距離のRMS[メートル] |
点の数 |
投影誤差のRMS[ピクセル] |
光軸までの距離のRMS[メートル] |
| 0Z5A9686.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
0 |
|
|
1 |
0.0101665 |
0.000178274 |
| 0Z5A9690.JPG |
Canon EOS 5D Mark III EF24mm f/2.8 IS USM 24mm 5760x3240 |
0 |
|
|
1 |
0.0156892 |
0.000212372 |
|
| 写真 |
写真の名前。 |
| カメラのモデル |
写真を撮影するために使用されたカメラのモデルの名前。 |
| 点の数 |
写真内の基準点の数。 |
| 投影誤差のRMS |
投影誤差(ピクセル数)。RMSは、写真に表示されるすべての基準点の再投影における誤差の二乗平均平方根です。 |
| 光軸までの距離のRMS |
光軸までの距離を二乗した数値の平均の平方根。光軸は、特定の写真の位置から始まり、その写真の中で観測される基準点の位置を通過する、3Dラインです。実際の点の3D位置からその光軸までの直交距離が、光軸までの距離です。 |
同様に、プロジェクトにユーザータイポイントがある場合、ユーザータイポイントの精度がより低い(データセット内で最低の精度)写真を表示する表が含まれます。もう1つの表には各写真のユーザータイポイントの数とその平均投影誤差の詳細が表示されます。